|
| Overview | All Modules | Tutorial | User's Guide | Programming Guide |
| Previous | COVISE Online Documentation | Next |
Note for the experienced user:
This chapter has been reworked to demonstrate the new features for building maps quicker and easier. COVISE provides Complex Modules like TracerComp, CuttingSurfaceComp, or IsoSurfaceComp which include modules Colors, Collect etc.
For details please see Online Help, User's Guide, and Module Reference Guide.
In this chapter you learn how to
This section gives a very short overview how to use COVISE modules for the analysis of simulation data.
In the example the bounding geometry is a channel with two inlets. The grid was created with PROSTAR, the pre- and postprocessing program for STAR and the simulation was performed with STAR. In a previous COVISE session the grid and the simulation result files have been converted to COVISE format, as this format allows very compact files and fast reading by COVISE.
In the directory covise/share/covise/example-data/tutorial you find the files
tiny_geo.covise contains an unstructured grid while the other files contain data.
The following tutorial module pipelines (also called maps or nets) are located in the directory covise/net/general/tutorial/. In the next section only the most important module ports and parameters are explained. For detailed information about the modules a documentation in html format is available.
Assuming we don't know what the files contain it may be useful to first make the simulation grid visible. The following modules have this or related functionality:
ShowGrid generates lines, points, hulls or bounding boxes for structured/rectilinear/uniform grids.
DomainSurface generates the outer surface of an unstructured grid.
SimplifySurface reduces the number of polygons representing a surface.
tutorial_grid_1.net
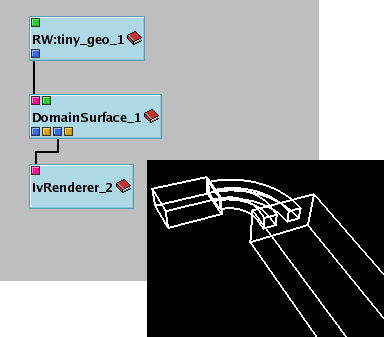
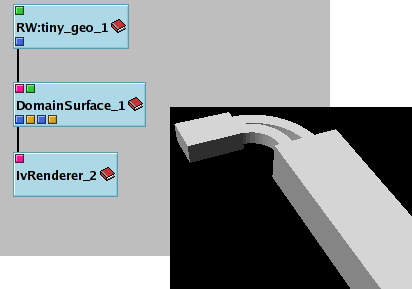
Start COVISE and open a new session. Choose the file tutorial_grid_1.net and execute the module network. Examining the module network, you see, that RWCovise is from the category IO-Module. It imports the data file tiny_geo.covise and generates an output data object containing an unstructured grid. The file name is specified as a file browser parameter.
The module DomainSurface from the category tools determines the outer surface of the grid or the edges of the outer surface. DomainSurface receives the unstructured grid as input data object. It produces polygons representing the outer surface which are available at the first output port.
This port is connected with the module Renderer which receives the poygons as input data objects. Figure 4.1 shows the map and the results displayed in the renderer window.
Figure 4.1: tutorial_grid_1
The disadvantage of the representation in Fig. 4.1 is that you can't see inside the channel.
Load the map tutorial_grid_2.net. The difference to the first map is that the third output port of DomainSurface is connected to the Renderer. This port outputs data objects which contain the edges of the outer surface.
Figure 4.2: tutorial_grid_2
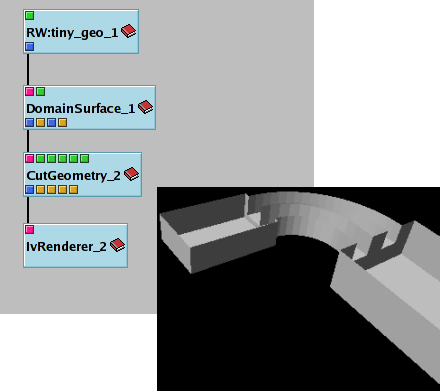
Another possibility to look inside the channel is to cut away parts of the geometry. This can be done by the module CutGeometry. Load the map tutorial_grid_3.net. The module CutGeometry cuts the geometry with a plane.
The plane is defined using the parameters scalar and vertex. Vertex defines the orientation of the plane and also the cutting direction. Scalar positions the plane along its normal direction. In this example vertex is [0.0 0.0 -0.1] and scalar is -0.12. This defines a plane which cuts away the upper surface of the channel.
Figure 4.3: tutorial_grid_3
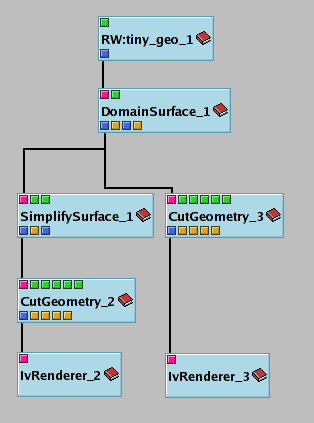
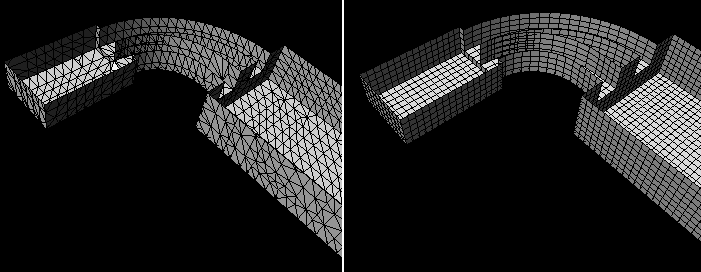
If a surface contains too many polygons, it can't be displayed with an acceptable frame rate (at least 12 frames per second).
For interactive handling it is necessary to reduce the number of polygons, which is done by the module SimplifySurface (see tutorial_grid_4.net).
Figure 4.4: tutorial_grid_4
Typical vector data resulting from a simulation is the velocity field. The following modules have to deal with vector data:
TracerComp
VectorField (explicitly used in tutorial_vel3.net only - otherwise contained, implicitly,in CuttingSurfaceComp)
computes small lines at each grid point. The direction of the lines represents the direction of the velocity vector and the size the amount of the velocity.
tutorial_vel_1_new.net
Figure 4.6: tutorial_vel_1_new
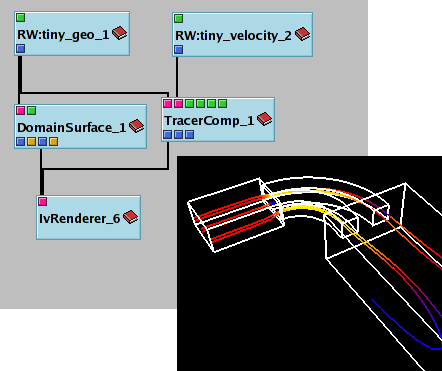
The module TracerComp computes streamlines (Specify 'Streamlines' as parameter taskType in the Tracer). Its first input port receives the grid object and the second port the data object containing the velocity field.
The starting points of the streamlines and the number of streamlines are specified via module parameters.startpoint1 and startpoint2 define a line. no_of_startpoints defines how many streamlines start on this line. Usually it is difficult to determine the coordinates of the two points, if you don't know the size and position of the grid. In this example we choose [-0.4 0.5 0.02] for startpoint1 and [-0.4 0.3 0.02] for startpoint2 and draw 6 streamlines.
tutorial_vel_2_new.net
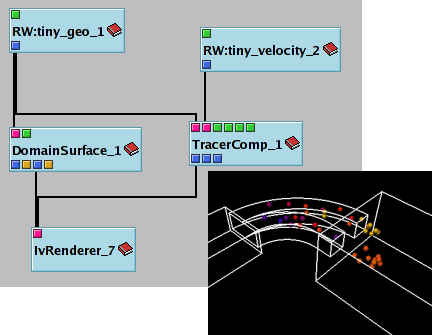
The map tutorial_vel_2_new.net shows an example of animated particle traces.
The layout of the map is the same as tutorial_vel_1_new.net, but you have to specify 'particle' in the parameter taskType in TracerComp. i The output of TracerComp contains sets of points where each set represents the position of the particles at a certain timestep, together with velocity data attached to the points. TracerComp integrates the function to make particles more visible by displaying small spheres instead of points (specify radius as parameter) and to map output data to colors.
As soon as the pipeline is executed, the geometry is displayed in the renderer window. In addition, the renderer contains a slider for selecting the timesteps of the animation. For a continuous animation press the play button.
Figure 4.7: tutorial_vel_2_new
The map tutorial_vel_3.net is an 'old-fashioned' map - have a look at it for information only and don't use it as an example; it shows a flow visualization with small lines attached to the grid points which depict the magnitude and the direction of the respective velocities.
The module VectorField needs the grid and the velocity data as input data objects and computes lines and data attached to the lines as output objects. The data are mapped to colors using Colors and Collect.
Figure 4.8: tutorial_vel_4_new
Typical scalar data resulting from a simulation are e.g. pressure or temperature. Modules for visualizing scalar data are:
CuttingSurfaceComp computes a cutting plane, cylinder or sphere in unstructured grids. In addition, it can map scalar data to colors. IsoSurfaceComp computes a surface connecting all points in space, which have the same scalar value. In addition, it can map scalar data to colors. Colors is used in this example to select a colormap (including minimum, maximum, annotation)
tutorial_pressure_1_new.net
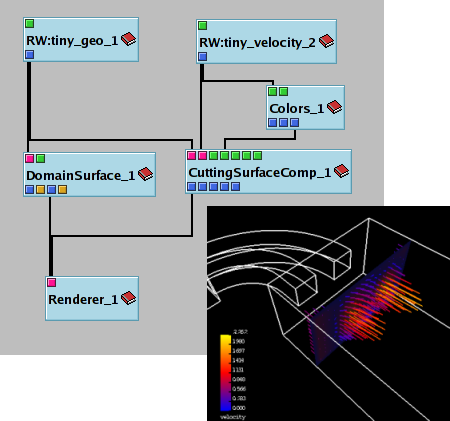
Figure 4.9: tutorial_pressure_1_new
CuttingSurfaceComp from the category filter then extracts a surface (plane, cylinder, sphere). It needs the grid object and the data object containing scalar data as input and creates polygons or tristrips which form the cuttingsurface and data on the surface as output objects. In addition, the data are mapped to colors and combined into a geometry object together with the polygons/tristrips.
Using the parameter option you define the shape of the surface. Map the parameter to the ControlPanel by clicking on the button in front of the parameter. Now you can see that you have the options plane, cylinder and sphere. Using the parameters vertex and scalar you specify the orientation and position of the surface.
For a plane the parameter vector is the normal of the plane and the scalar is the distance of the plane from the origin. In this example the normal of the plane is (0 0 1) and the distance from the origin is 0.05.
A scalar parameter such as the distance is defined using three numbers: minimum, maximum and current value. Map the parameter distance to the ControlPanel. The default interactor in the control panel is a VCR type player. You can increase or decrease the distance via the player buttons applying a certain increment which is specified in an extra field. Modify the distance parameter to get an overview of the pressure distribution in the channel.
In the render window you can also see a color bar. Color bars are produced by the modules Colors and ColorEdit (explicitly or implicitly, if the function of Colors is integrated e.g. in the complex module CuttingSurfaceComp). They are only displayed in the render window if they are selected there. Click on the name of the data object to pop it up and click again to hide the colorbar.
Note: The module Colors_2 is used to select the colormap, the minimum and maximum values, and the annotation, e. g. "Pressure" (default: Colors).
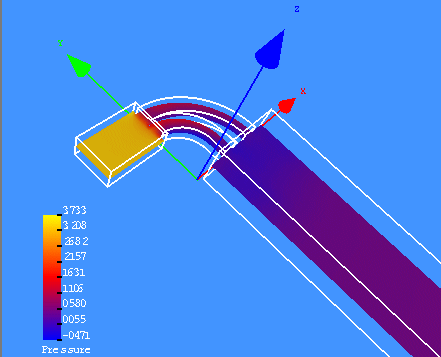
Figure 4.10: tutorial_pressure_1_new: Results in the Renderer
Figure 4.11: tutorial_pressure_2_new
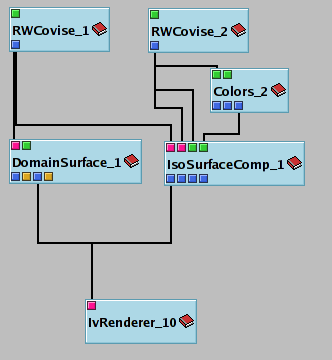
Have a look at the map in the MapEditor window. Again the first RWCovise reads the grid while the second one reads the pressure data.
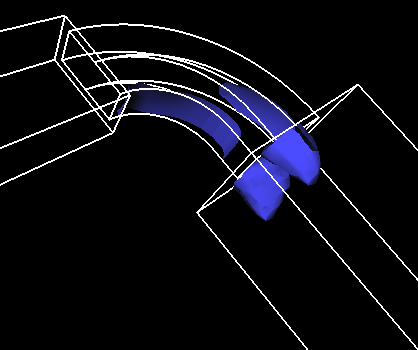
Figure 4.12: tutorial_pressure_2_new: Results in the Renderer
The normals are available at the third output port.. The normals are used for the computation of the surface lighting. If you do not provide normals for a surface the renderer computes one normal per polygon face. Normals per vertex result in smoother surfaces than normals per face.
Note: Like CuttingSurfaceComp in tutorial_pressure_1_new.net, IsoSurfaceComp maps the data to colors. The Module Colors_2 is used to select the colormap, the minimum and maximum values, and the annotation, e. g. "Pressure" (default: Colors).
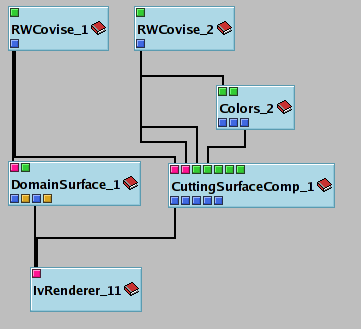
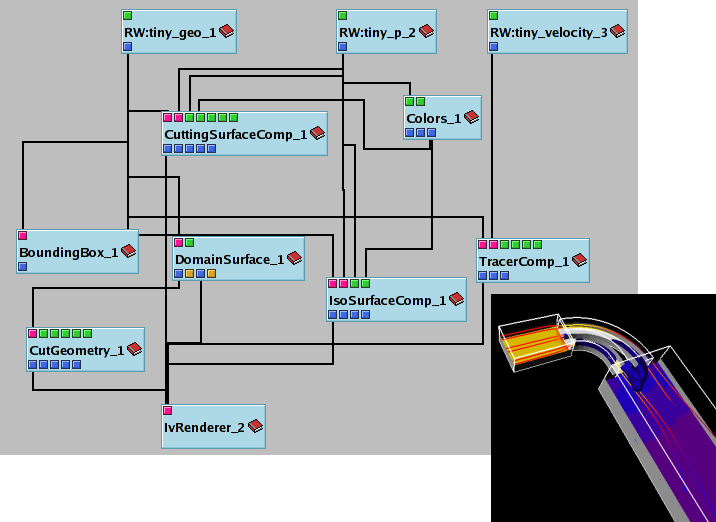
channel_new.net
The example channel_new.net below combines some of the features shown before in one map. In addition, it shows how to get the size of your geometry object using the BoundingBox module.
Figure 4.13: channel_new
| Previous | Next |
| Authors: Martin Aumüller, Ruth Lang, Daniela Rainer, Jürgen Schulze-Döbold, Andreas Werner, Peter Wolf, Uwe Wössner |
| Copyright © 1993-2022 HLRS, 2004-2014 RRZK, 2005-2014 Visenso |
COVISE Version 2021.12
|